Maybe it was related to the first succcessful free flight of NASA’s Morpheus lander or the launch of China’s Chang’e 3 lunar probe. For whatever reason, there seems to be a pre-Christmas rush on planetary press conferences and announcements. In the last six days, three separate projects have revealed details of their plans for robotic missions to the Moon and Mars.
Moon Express
Last Thursday, Moon Express unveiled its MX-1 lunar-lander design in front of 10,000 people at the closing session of Autodesk University in Las Vegas.
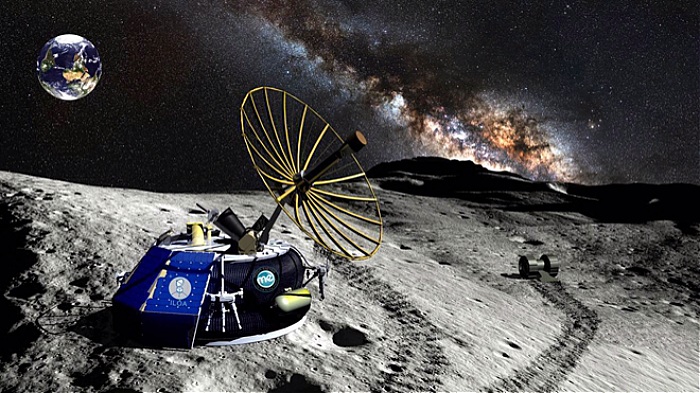
Moon Express, which is competing for the Google Lunar X-Prize, said the lander will use hydrogen peroxide and kerosene as propellents. Hydrogen peroxide can also be used, by itself, as a monopropellent. Moon Express noted that hydrogen peroxide can be manufactured from water that is available on the Moon, which it believes “would be a game changer in the economics of lunar resources and solar system exploration.”